End effectors and TCP calibration
Tool Center Point calibration is available for End Effectors. Add new End Effector or edit existing one by double click.
3D model
MachineMaker shows transparent robot and imported end effector CAD model. All 3D model elements are marked as Base node by default. Use right mouse button to ungroup unnecessary elements.It is necessary to place 3D model to the robot flange using transformation panel at the right bottom corner. You can also set name of End Effector and select supported tool types.
TCP calibration
Click TCP tab to open tool center point panel. It is necessary to place tool to the correct position. You can use transformation panel or hold Left Ctrl key to enter Drag&Drop mode. Use Visualize tool checkbox to show tool visibility. Click Reset to clear all fields.
Use Robot TCP Calibration function to obtain accurate values
It is also possible to set tool overhang in you have tool-tip calibration values from robot and want to enter this values to the XYZABC fields.
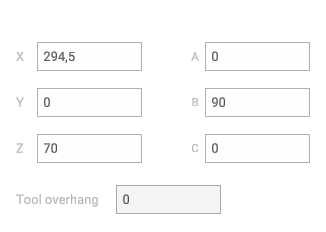
You can set tool overhang to zero and calibrate tool base point. Or you can specify tool overhang and calibrate tool-tip. Both variants are correct for SprutCAM and MachineMaker.
Quaternions, Radians and Euler Angles
Some robots (such as ABB) use quaternions or Radians instead of euler angles. For this kind of robots MachineMaker will show quaternions fields. You can switch to Euler angles if you preffer to use human-friendly Euler angles.
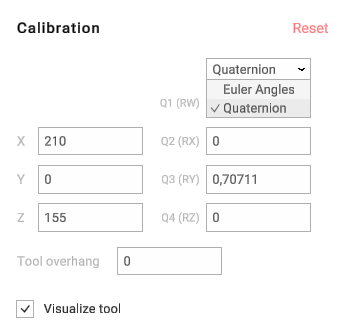
MachineMaker will save TCP values in correct format for robot anyway. So, even if you use Euler angles and set tool position in human-friendly A B C values, MachineMaker will convert it to quaternions automatically.