Управление захватами
Операции по перемещению детали часто требуют контроля над устройствами, такими как тиски, кулачки, инструмент-гриппер и др., которые используются для фиксации детали или перемещения детали из начального положения в конечное. Функция управления захватами позволяет автоматически вставлять команды CLData для изменения состояния зажимного устройства в процессе перемещения детали от одного держателя заготовки к другому.

Новая команда CLData
Новая специальная команда CLData используется для индикации изменения состояния зажимного устройства. Эта команда учитывается при моделировании проекта, а также выводится в постпроцессор как специальная M-команда. Команда <Clamp> в CLData имеет следующий формат:
Clamp <ID устройства>: On/Off, Dir(<Направление>)
<ID устройства> - это уникальное число, используемое для идентификации устройства захвата. Способы задания ID смотрите в разделе о добавлении захватов.
On/Off - флаг, определяющий зажим или разжим устройства.
Dir(<1,-1,0>)- указывает направление движения осей захвата в процессе зажима/разжима. Рассмотрим этот параметр на примере процесса зажима. Если губки сдвигаются внутрь, чтобы зафиксировать деталь (значение оси для незажатого положения больше, чем значение оси для зажатого положения), то направление равно "-1"; если губки выдвигаются наружу для фиксации детали (зажим находится внутри детали), то направление «+1». Для разжима направление меняется на противоположное. Направление «0» указывает на одинаковые значения оси зажима для зажатого/незажатого состояния (обычно это ошибка в параметрах зажимного устройства).
Автоматическое управление захватами
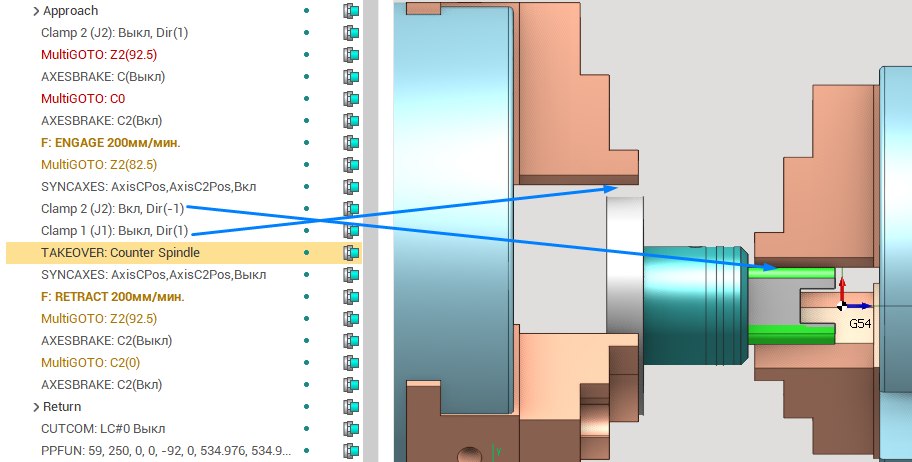
Операции по перемещению детали, такие как Захват и перемещение, могут автоматически выводить специальные команды CLData <Clamp>, когда происходит передача детали от одного держателя заготовки к другому. Сама передача выполняется командой <Takeover>. Если это включено в параметрах операции, то <Clamp>-команды зажима/разжима устройства генерируются автоматически, что соответствует типичному процессу передачи детали (пример дерева команд CLData показан на снимке экрана выше). Такая последовательность команд обеспечивает постоянное удержание детали каким-либо устройством:
Зажим конечного захвата (Clamp 2: Вкл)
Разжим исходного захвата (Clamp 1: Выкл)
Перехват детали из исходного в конечный держатель (Takeover)
Параметры управления захватами
Операции по перемещению детали имеют следующие параметры, влияющие на вывод команд управления зажимами.
Операции по перемещению детали в общем случае могут работать с 3 держателями заготовок, что соответствует 3 этапам процесса захвата и размещения.
Деталь расположена на исходном коннекторе заготовки
Деталь перемещается с помощью захвата (гриппера)
Деталь расположена на конечном держателе заготовки после перемещения
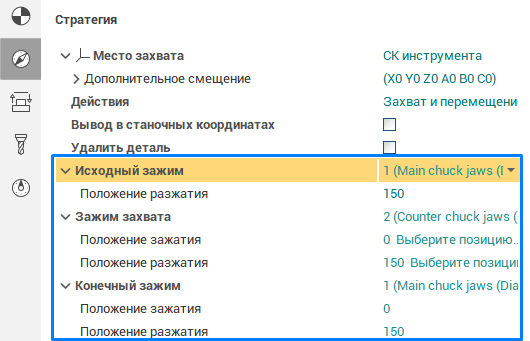
Параметры зажима имеют 3 группы параметров, которые соответствуют этапам выше. Держатели заготовок разных этапов могут совпадать, также некоторые операции этой группы имеют более простой процесс перемещения детали. Это также отражается на параметрах зажима. Рассмотрим параметры одной стадии.
Комбобокс "Устройство захвата" позволяет выбрать из доступных в проекте захватов тот, который используется для данного этапа перемещения детали. См. раздел ниже о том, как сделать зажимное устройство доступным для выбора в этом списке. Этот параметр также может иметь значение <Нет>, что означает, что команды по управлению захватами не выводится. Пункт перечисления <Пользовательский> позволяет явно указать идентификатор зажима устройства, даже если он отсутствует в схеме станка или в оснастке.
Положение зажатия — это значение оси, которое соответствует зажатому состоянию устройства на данном этапе перемещения детали.
Положение разжатия — это значение оси, соответствующее разжатому состоянию устройства на данном этапе перемещения детали.
Для примера задания этих параметров смотрите дистрибутивные проекты с операциями перемещения детали.
Добавление устройства захвата детали в проект
В проекте есть список зажимных устройств, где каждое устройство идентифицируется уникальным номером. Этот список формируется автоматически и используется для выбора зажимного устройства для различных стадий перемещения детали. В настоящее время существует 3 способа добавить устройство захвата.
Добавление как оснастки
На вкладке «Оснастка» параметров групп операций «Станок/Установ/Деталь» можно создать устройство захвата с помощью кнопок "Добавить патрон", "Добавить тиски" или "Добавить зажим", либо загрузить модель захвата из файла .mcp. Параметры приспособления можно использовать для изменения модели зажима, например, чтобы установить минимальное и максимальное значение для оси захвата. Дополнительную информацию о создании фикстур и их параметрах см. в разделе документации Оснастка.
2. Специальная ось, созданная в SprutCAM "Machine Maker". Вы можете создать в Machine Maker захват или инструмент для прихваточной сварки как специальную ось станка с флагом «зажим» и эта ось будет использоваться для изменения состояния захвата. Также становится доступным автоматическое зажимание/разжимание такого устройства с помощью Операции по перемещению детали. Для получения дополнительной информации о том, как создать такое зажимное устройство, см. документацию "SprutCAM Machine Maker".
3. "Параметрические" кулачки . Многие токарные станки имеют кулачки шпинделя или противошпинделя, которые специальным образом определены в файле схемы станка. Они вращаются вместе со шпинделем и учитываются при моделировании и обнаружении столкновений. Эти автоматически распознаваемые оси кулачков также добавляются в список зажимов станка. Идентификатор зажима для них назначается автоматически. См. дистрибутивный проект Turn-Milling/Takeover.stc для примера такой схемы станка и использования зажимов в операции MTM перехват.