Операция на основе текста УП, Токарная операция на основе текста УП
|
Задайте текст УП |
|
Выберите интерпретатор |
|
Нажмите "Пуск" |
|
Получите траекторию |
|
|
… |
|
… |
|
… |
|
< Операция на основе текста УП > ![]() и < Токарная операция на основе текста УП >
и < Токарная операция на основе текста УП >  , расположены в группе операций <Вспомогательные>. Они могут применяться, в том числе для индексной и непрерывной обработки на 4-х и 5-ти координатных обрабатывающих центрах. Поддерживаются все доступные типы моделирования, в том числе аддитивная обработка для симуляции наращивания слоя материала. Токарная операция на основе текста УП поддерживает только токарный инструмент. Операция на основе текста УП не поддерживает токарный инструмент. Обе операции не поддерживают электроэрозионную обработку. Данные операции позволяют выполнить:
, расположены в группе операций <Вспомогательные>. Они могут применяться, в том числе для индексной и непрерывной обработки на 4-х и 5-ти координатных обрабатывающих центрах. Поддерживаются все доступные типы моделирования, в том числе аддитивная обработка для симуляции наращивания слоя материала. Токарная операция на основе текста УП поддерживает только токарный инструмент. Операция на основе текста УП не поддерживает токарный инструмент. Обе операции не поддерживают электроэрозионную обработку. Данные операции позволяют выполнить:
прямое управление симуляцией станка посредством G-кодов;
проверку и оптимизацию управляющей программы;
преобразование УП одной стойки в другую (для станков с идентичной кинематической схемой);
отладку работы собственного интерпретатора в процессе его создания.
Формирование траектории инструмента осуществляется на основе следующих параметров операции:
Заданного текста УП на панели параметров
 < Рабочее задание >;
< Рабочее задание >;Выбранного интерпретатора и настроек на панели параметров
 < Стратегия >;
< Стратегия >;Назначенного инструмента на панели параметров
 < Инструмент >.
< Инструмент >.
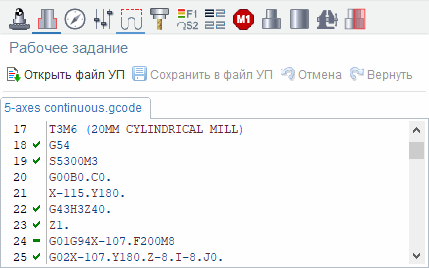
![]() < Текст управляющей программы > может быть написан непосредственно во встроенном текстовом редакторе или загружен из внешнего файла и отредактирован, в случае необходимости. Встроенный текстовый редактор поддерживает подсветку синтаксиса основных ключевых конструкций языка программирования стоек ЧПУ, а также широкий перечень сочетаний клавиш для работы с текстом.
< Текст управляющей программы > может быть написан непосредственно во встроенном текстовом редакторе или загружен из внешнего файла и отредактирован, в случае необходимости. Встроенный текстовый редактор поддерживает подсветку синтаксиса основных ключевых конструкций языка программирования стоек ЧПУ, а также широкий перечень сочетаний клавиш для работы с текстом.
Более подробная информация о возможностях работы с текстом УП описана в разделе < Job assignment for G-code based operation >
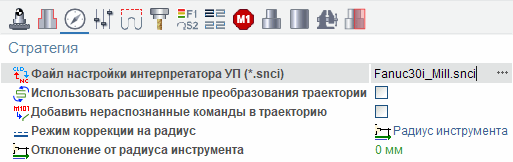
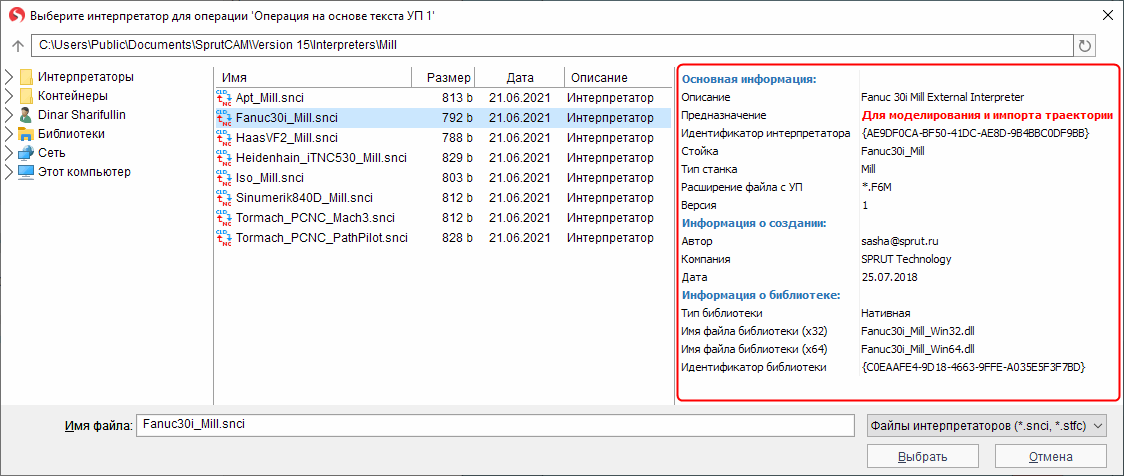
![]() < Файл настройки интерпретатора УП (*.snci) > определяет формат распознавания команд стойки в кадрах управляющей программы. В соответствующем параметре задается полный путь к выбранному интерпретатору. Значение параметра можно корректировать как вручную, так и с помощью диалога выбора файла, который запускается нажатием кнопки
< Файл настройки интерпретатора УП (*.snci) > определяет формат распознавания команд стойки в кадрах управляющей программы. В соответствующем параметре задается полный путь к выбранному интерпретатору. Значение параметра можно корректировать как вручную, так и с помощью диалога выбора файла, который запускается нажатием кнопки ![]() . В процессе выбора доступна панель предварительного просмотра информации об интерпретаторе (описание, предназначение, тип стойки, авторы и прочее):
. В процессе выбора доступна панель предварительного просмотра информации об интерпретаторе (описание, предназначение, тип стойки, авторы и прочее):
Поддерживается возможность выбора интерпретатора из контейнера.
В настоящее время для использования доступны интерпретаторы следующих систем ЧПУ:
|
Группа станка |
Система ЧПУ |
Комментарий |
Примечание |
|
Фрезерный |
APT |
Только для импорта траектории |
|
|
Apt_Simplify_3D |
Только для импорта траектории |
|
|
|
ISO |
Только для импорта траектории |
|
|
|
Fanuc 30i |
Для моделирования и импорта траектории |
|
|
|
Haas VF-2 |
Для моделирования и импорта траектории |
|
|
|
Heidenhain iTNC 530 |
Для моделирования и импорта траектории |
|
|
|
NC210 |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
|
Sinumerik 840D |
Для моделирования и импорта траектории |
|
|
|
Tormach PCNC Mach3 |
Для моделирования и импорта траектории |
|
|
|
Tormach PCNC PathPilot |
Для моделирования и импорта траектории |
|
|
|
Global control |
Только для импорта траектории |
Необходима дополнительная лицензия |
|
|
Токарно-фрезерный |
Sinumerik 840D |
Для моделирования и импорта траектории |
|
|
Okuma OSP-P300 |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
|
Робот |
Fanuc robot (контроллер R-30iB) |
Для моделирования и импорта траектории |
|
|
Kuka robot |
Для моделирования и импорта траектории |
|
|
|
Motoman robot |
Для моделирования и импорта траектории |
|
|
|
ABB robot |
Для моделирования и импорта траектории |
|
Примечание: Все интерпретаторы реализуют только перечень команд, генерируемый соответствующими постпроцессорами из дистрибутива SprutCAM.
Интерпретаторы "Только для импорта траектории" не поддерживают соответствие строка УП - траектория движения инструмента.
При выборе интерпретатора обратите внимание на его предназначение (поле Предназначение на панели предварительного просмотра).

Выбранный интерпретатор должен быть предназначен для моделирования по управляющей программе. В ином случае траектория движения инструмента может быть некорректной (иметь смещение относительно системы координат заготовки, сдублированные подходы/отходы, неверную начальную позицию и прочее).
![]() < Использовать расширенные преобразования траектории > - настройка включает преобразование траектории управляющей программы в геометрическую, что позволяет изменять её с помощью карты робота и/или операции копирования. Если настройка отключена, формируется сразу финальная траектория (максимально точно повторяющая управляющую программу), без возможности её изменения.
< Использовать расширенные преобразования траектории > - настройка включает преобразование траектории управляющей программы в геометрическую, что позволяет изменять её с помощью карты робота и/или операции копирования. Если настройка отключена, формируется сразу финальная траектория (максимально точно повторяющая управляющую программу), без возможности её изменения.
![]() < Шаг растеризации машинных перемещений > - настройка доступна только при использовании расширенного преобразования траектории (см. выше). В этом режиме на первом этапе траектория движения инструмента управляющей программы преобразуется в геометрическую кривую. Для максимального повторения исходной траектории машинные перемещения растеризуются. Шаг растеризации задаётся этой настройкой. Чем меньше шаг, тем точнее будет повторена исходная траектория.
< Шаг растеризации машинных перемещений > - настройка доступна только при использовании расширенного преобразования траектории (см. выше). В этом режиме на первом этапе траектория движения инструмента управляющей программы преобразуется в геометрическую кривую. Для максимального повторения исходной траектории машинные перемещения растеризуются. Шаг растеризации задаётся этой настройкой. Чем меньше шаг, тем точнее будет повторена исходная траектория.
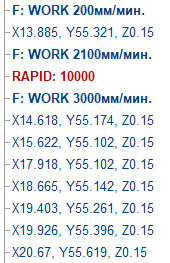
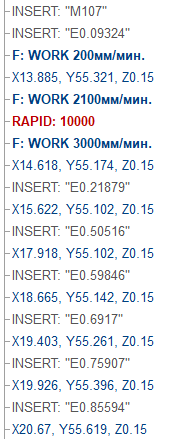
![]() < Добавить нераспознанную команду в траекторию > - параметр включает добавление всех нераспознанных интерпретатором команд управляющей программы в траекторию движения инструмента. Нераспознанные команды будут добавлены в траекторию в виде текста команды INSERT перед распознанными командами.
< Добавить нераспознанную команду в траекторию > - параметр включает добавление всех нераспознанных интерпретатором команд управляющей программы в траекторию движения инструмента. Нераспознанные команды будут добавлены в траекторию в виде текста команды INSERT перед распознанными командами.
Пример работы параметра "Добавить нераспознанные команды в траекторию"
|
Управляющая программа |
Параметр отключен |
Параметр включен |
|
Команды M107, E - не распознаются интерпретатором |
|
|

![]() < Инструмент >, которым будет выполнена обработка, определяется на соответствующей вкладке окна параметров операции. При создании операций на основе текста УП им назначается инструмент, заданный по умолчанию для соответствующей обработки (фрезерной или токарной).
< Инструмент >, которым будет выполнена обработка, определяется на соответствующей вкладке окна параметров операции. При создании операций на основе текста УП им назначается инструмент, заданный по умолчанию для соответствующей обработки (фрезерной или токарной).
Примечание: На текущий момент номер инструмента, указанный в тексте УП, не учитывается при выборе из списка инструментов проекта или библиотеки. В связи с обозначенной выше особенностью, в качестве рабочего задания для каждой такой операции может быть присвоен только тот текст УП, в котором обработка ведется одним инструментом.
Операция на основе текста УП"
Сопутствующие ссылки:
Рабочее задание для Операции на основе текста УП, Токарной операции на основе текста УП
Сочетания клавиш для работы с текстом УП
Создание собственного интерпретатора