Построение переходов
Начиная с версии 12, CAM система использует алгоритм обхода столкновений для построения ускоренных перемещений между операциями и внутри них. Для корректной работы алгоритма необходимо достоверное описание роботизированной ячейки, поскольку он основан на проверке столкновений между узлами станка (робота).
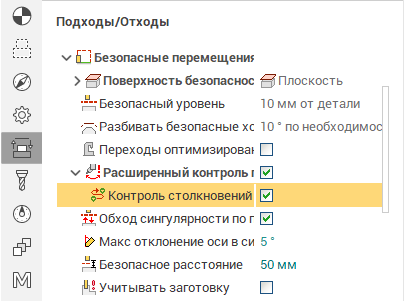
Включите опцию «Контроль столкновений для переходов», чтобы активировать алгоритм для построения переходов внутри операции. Параметр «Безопасное расстояние» определяет минимально допустимое расстояние до столкновения. Это значение должно быть минимальным и достаточным. Если оно слишком мало, формируемая траектория инструмента может быть небезопасной. Если безопасное расстояние слишком велико, то переход не сможет быть построен или время расчета будет неприемлемым.
Поддерживаемые операции
Эта опция на данный момент доступна только для роботов в следующих операциях (и в их наследниках, если нет специального запрета):
Начальная и конечная точка перехода
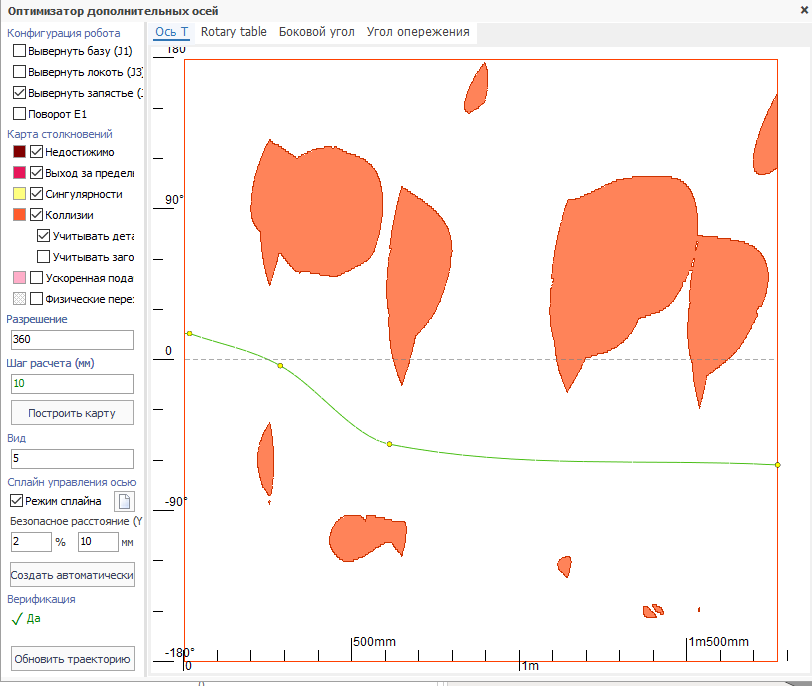
Очень важно убедиться, что столкновения отсутствуют в начальной и конечной точках перехода, в противном случае будет сформирована некорректная траектория. Сделать это можно с помощью оптимизатора осей. Серые зоны на карте соответствуют переходам, где ограничения не показываются. Построенная кривая должна обходить все запретные зоны.
Учет заготовки
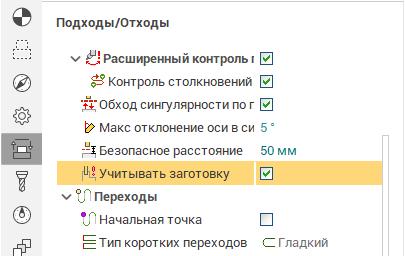
По умолчанию алгоритм только проверяет столкновения с деталью (и инструментом/станком) при построении перехода. Для включения проверки столкновений с заготовкой используйте параметр "Учитывать заготовку".
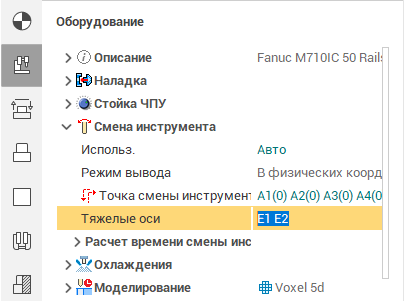
Запрет перемещений некоторых осей
Алгоритм обхода столкновений использует все оси станка для поиска пути между начальной и конечной точками. Если есть необходимость исключить или минимизировать движения каких-либо осей, то они должны быть перечислены в списке "тяжелых осей". Если требуется перемещение тяжелых осей, то переход выполняется в 3 этапа: вначале отход в точку смены инструмента, затем позиционирование тяжелых осей и в конце движение в заданную точку.