List of interpreters
Currently, interpreters of the following CNC systems are available for use:
|
Machine group |
CNC system |
Comment |
Note |
|
Milling |
APT |
Import toolpath only |
|
|
Apt_Simplify_3D |
Import toolpath only |
|
|
|
ISO |
Import toolpath only |
|
|
|
Global control |
Import toolpath only |
An additional license is required |
|
|
Fanuc 30i |
To simulate and import a toolpath |
|
|
|
Haas VF-2 |
To simulate and import a toolpath |
|
|
|
Heidenhain iTNC 530 |
To simulate and import a toolpath |
|
|
|
Mazatrol SmoothG |
To simulate and import a toolpath |
An additional license is required |
|
|
NC210 |
To simulate and import a toolpath |
An additional license is required |
|
|
Sinumerik 840D |
To simulate and import a toolpath |
|
|
|
Tormach PCNC Mach3 |
To simulate and import a toolpath |
|
|
|
Tormach PCNC PathPilot |
To simulate and import a toolpath |
|
|
|
Turning |
Mazatrol SmoothC |
To simulate and import a toolpath |
An additional license is required |
|
Turn-milling |
Fanuc 21i |
To simulate and import a toolpath |
An additional license is required |
|
NC220 |
To simulate and import a toolpath |
An additional license is required |
|
|
Sinumerik 840D |
To simulate and import a toolpath |
|
|
|
Okuma OSP-P300 |
To simulate and import a toolpath |
An additional license is required |
|
|
Robot |
Fanuc robot (R-30iB controller) |
To simulate and import a toolpath |
|
|
Kuka robot |
To simulate and import a toolpath |
|
|
|
Motoman robot |
To simulate and import a toolpath |
|
|
|
ABB robot |
To simulate and import a toolpath |
|
|
|
Nachi robot (AW Format) |
To simulate and import a toolpath |
An additional license is required |
Note: All interpreters support command list generated by postprocessors in SprutCAM X distribution kit only.
"Import toolpath only" interpreters are not supported matching line NC code - trajectory of tool movement.
When you select an interpreter, pay attention to its purpose (the Purpose field in the Preview pane)
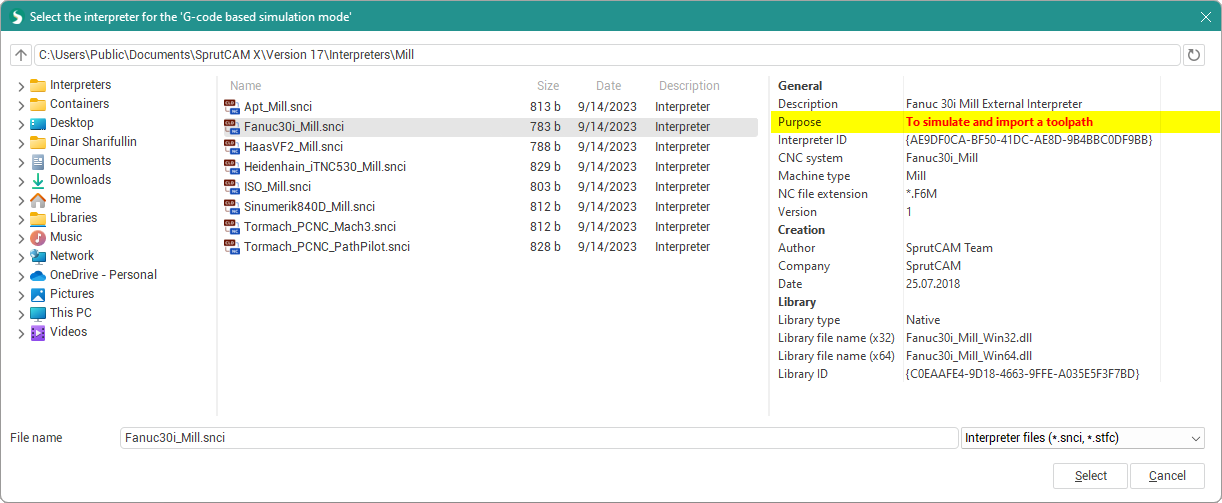
The selected interpreter should be intended for simulation. Otherwise, the trajectory of the tool may be incorrect (shifted relative to the coordinate system of the workpiece, duplicated approaches/retracts, incorrect starting position, etc.).