Triple wall external corner probing parameters
Triple wall external corner probing consist of the following steps:
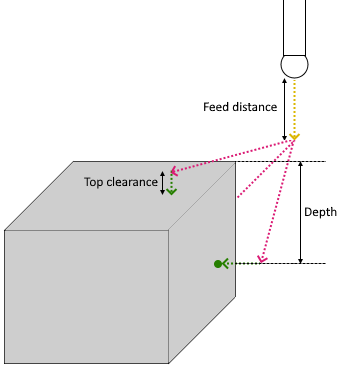
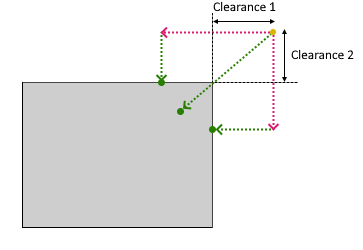
The tool moves the distance specified in the < Feed distance > and approaches the starting point of the measurement cycle that is the intersection of touch point on first wall and touch point on second wall at a distance specified in <Clearance 1>, <Clearance 2> , respectively, along orthogonal direction of their vectors and the intersection point is raised by the distance specified in the <Top clearance> + <Depth> . Moving at "Approach feed";
The tool approaches a point remote from touch point on first side along its < Target vector > at the < C learance 1 > distance (m oving at "Long link feed" ) and approaches touch point of the first side (moving at "Work feed") and then returns (m oving at "Long link feed" ) to previous position ;
The tool returns to the starting point. M oving at "Long link feed";
The tool approaches a point remote from touch point on second side along its < Target vector > at the < C learance 2 > distance (m oving at "Long link feed" ) and approaches touch point of the second side (moving at "Work feed") and then returns (m oving at "Long link feed" ) to previous position ;
The tool returns to the starting point. M oving at "Long link feed";
The tool approaches a point remote from touch point on top side along its < Target vector > at the <Top clearance > distance (m oving at "Long link feed" ) and approaches touch point of the top side (moving at "Work feed") and then returns (m oving at "Long link feed" ) to previous position ;
The tool returns to the starting point. M oving at "Long link feed";
The tool is lifted up by a distance equal to <Feed distance >.
Parameters:
|
Type |
Description |
|
|
CmdPrm.Int[-1] |
Integer |
Probing cycle type: Double wall external corner probing value = 16 |
|
CmdPrm.Int[-2] |
Integer |
SubCode of cycle specified in " SubCode for postprocessor " property on the <Job Assignment> tab |
|
CmdPrm.Flt[-50] |
Double |
Feed distance, distance to start position of cycle |
|
CmdPrm.Flt[-51] |
Double |
Depth, distance from top side to touch point of fisrt and second wall |
|
CmdPrm.Flt[-56] |
Double |
Clearance 1, approach distance to touch poin t on first side |
|
CmdPrm.Flt[-57] |
Double |
Clearance 2,
approach distance to touch poin
t on second side
|
|
CmdPrm.Flt[-58] |
Double |
Top clearance, approach distance to touch poin t on top side |
|
CmdPrm.Flt[-100] |
Double |
Touch point on first wall value along X-axis |
|
CmdPrm. Flt [-101] |
Double |
T ouch point on first wall value along Y-axis |
|
CmdPrm. Flt [-102] |
Double |
T ouch point on first wall value along Z-axis |
|
CmdPrm.Flt[-103] |
Double |
T arget vector of touch point on first wall value along X-axis |
|
CmdPrm. Flt [-104] |
Double |
T arget vector of touch point on first wall value along Y-axis |
|
CmdPrm. Flt [-105] |
Double |
T arget vector of touch point on first wall value along Z-axis |
|
CmdPrm.Flt[-106] |
Double |
T ouch point on second wall value along X-axis |
|
CmdPrm. Flt [-107] |
Double |
T ouch point on second wall value along Y-axis |
|
CmdPrm. Flt [-108] |
Double |
T ouch point on second wall value along Z-axis |
|
CmdPrm.Flt[-109] |
Double |
T arget vector of touch point on second wall value along X-axis |
|
CmdPrm. Flt [-110] |
Double |
T arget vector of touch point on second wall value along Y-axis |
|
CmdPrm. Flt [-111] |
Double |
T arget vector of touch point on second wall value along Z-axis |
|
CmdPrm.Flt[-112] |
Double |
T ouch point on top wall value along X-axis |
|
CmdPrm. Flt [-113] |
Double |
T ouch point on top wall value along Y-axis |
|
CmdPrm. Flt [-114] |
Double |
T ouch point on top wall value along Z-axis |
|
CmdPrm.Flt[-115] |
Double |
T arget vector of touch point on top wall value along X-axis |
|
CmdPrm. Flt [-116] |
Double |
T arget vector of touch point on top wall value along Y-axis |
|
CmdPrm. Flt [-117] |
Double |
T arget vector of touch point on top wall value along Z-axis |