Захват и перемещение
Траектория и параметры
Операция "Захват и перемещение" разработана для управления специальным инструментом типа "захват" с целью перемещения заготовки внутри рабочей зоны оборудования.
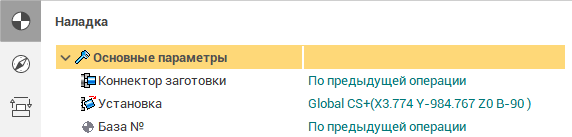
Заготовка перемещается из места, которое было задано в предыдущей операции, в новое место, которое определяется параметрами "Коннектор заготовки" и "Установ".
Все перемещения инструмента (гриппера) генерируются в системе координат заготовки.
Траектория операции "Захват и перемещение" состоит из трех секций: взятие, перенос, возврат.
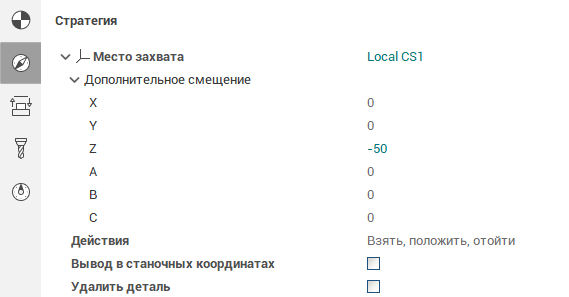
Секция взятие содержит перемещения захвата из исходной точки (обычно точка смены инструмента) в место захвата на детали. Место захвата определяется в геометрической системе координат на заготовке с возможностью ввода дополнительных смещений.
Секция переноса сродержит перемещения захвата вместе с деталью из исходного в требуемое положение. Перенос может выполняться как через безопасную плоскость, так и с обходом слолкновений.
Секция возврата сродержит перемещения пустого захвата в конечную точку (обычно точка смены инструмента).
Параметр "Действия" задает какие секции должны быть сгенерированы.
Если опция "Удалить деталь" включена, то заготовка исчезает после выполнения секции переноса.
Добавление Подхода/Отхода
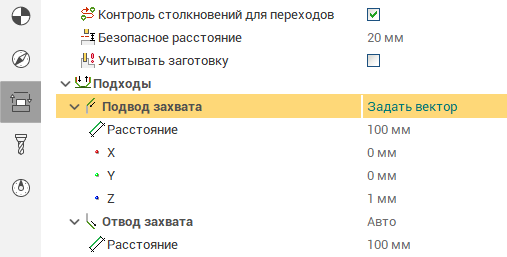
Используя эти параметры, вы можете определить длину и направление движений подхода/отхода инструмента к позициям захвата и/или размещения. Для примера, рассмотрим подробнее параметр «Подвод захвата». Этот параметр определяет положение, из которого инструмент начинает движение для непосредственного захвата детали (используя специальную подачу «engage»). Подвод захвата может быть трех типов:
Нет - Подход отключен
Авто - Подход выполняется вдоль оси инструмента
Задать вектор - Подход выполняется вдоль указанного направления
Параметр «Расстояние» определяет длину перемещения инструмента в выбранном направлении (движение осуществляется на подаче "engage").
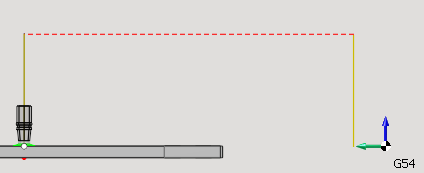
На скриншоте выше справа показан пример траектории операции "Захват и перемещение", где вертикальные сегменты соответствуют подходу/отходу (в этом примере они имеют одинаковую длину). Красный цветом показаны перемещения на ускоренной подаче, оливковым цветом — на подаче "engage/retract".
Обучающее видео по созданию операции "Захват и перемещение"
Следующий видеоролик демострирует способ создания сборочных проектов.
Операция "Перемещение к следующему установу"
Это особый вид операции "Захвата и перемещение", который, как и "Токарный перехват", берет положение детали для размещения из следующей операции (обычно это "Установ" или группа "Деталь"). Остальные параметры соответствуют общей операции "Захват и перемещение".
В основном эта операция используется для роботов и фрезерных станков. Для токарной или токарно-фрезерной обработки вместо нее рекомендуется использовать специализированную операцию "Токарный перехват".
Примеры дистрибутивных проектов
В дистрибутив SprutCAM включены несколько демонстрационных проектов с операциями "Захват и перемещение": "Milling/WoodWorking/FrameAssembly.stcp", а также проекты из папки "Robots/Pick and place".
Сопутствующие ссылки:
Операции по перемещению детали
Требования к схеме станка для операций перемещения детали