Моделирование обработки по управляющей программе
Режим моделирования обработки по управляющей программе (УП) позволяет учесть особенности реализации постпроцессора при моделировании обработки. В этом режиме система автоматически формирует УП для каждой операции при её расчёте. Управление моделированием выполняется аналогично обычному управлению моделированием.
Включение режима моделирования по УП.
Включение осуществляется кнопкой  на панели инструментов, при активной закладке <Моделирование>.
на панели инструментов, при активной закладке <Моделирование>.
Примечание: Кнопка становится недоступной для переключения в случае, если используется режим многозадачной обработки;
Параметры режима моделирования по УП.
Моделирование по тексту управляющей программы выполняется на основе выбранного файла постпроцессора и файла интерпретатора, заданных на панели параметров < Оборудование > станка.
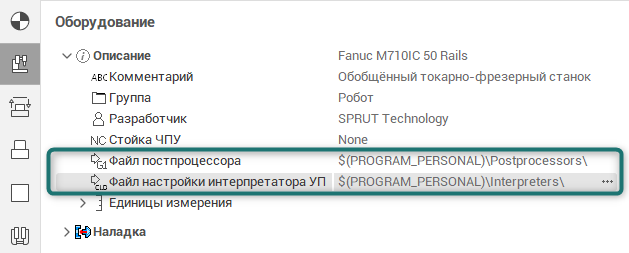
Интерпретатор представляет собой файл настроек системы ЧПУ станка (*.snci), расположенный в каталоге $(PROGRAM_PERSONAL)\Interpreters.
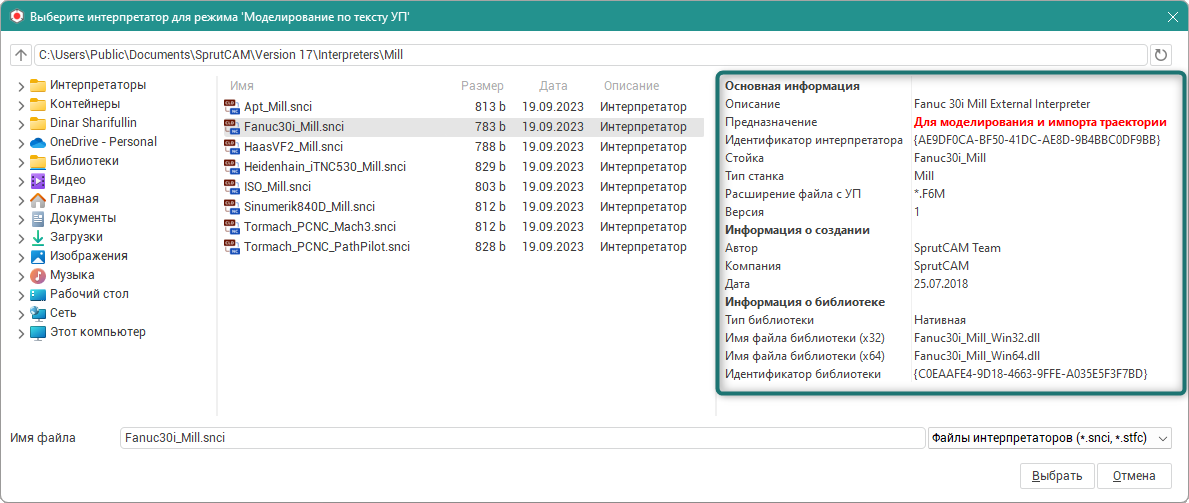
В процессе выбора доступна панель предварительного просмотра информации об интерпретаторе (описание, предназначение, тип стойки, авторы и прочее):
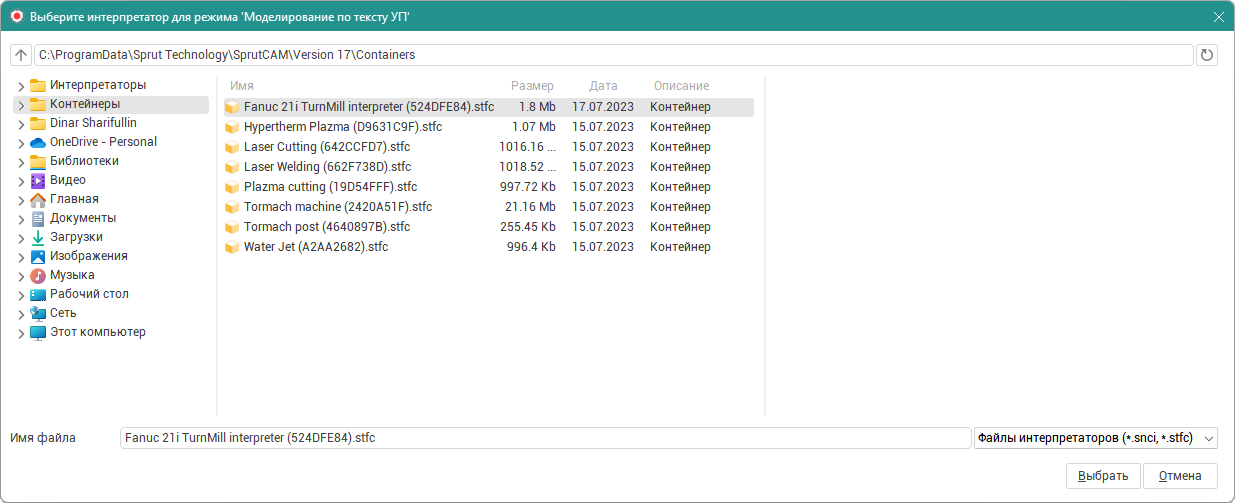
Поддерживается возможность выбора интерпретатора из контейнера. Для этого получите контейнер с интерпретатором. Затем откройте окно выбора интерпретатора и перейдите в папку с контейнерами.
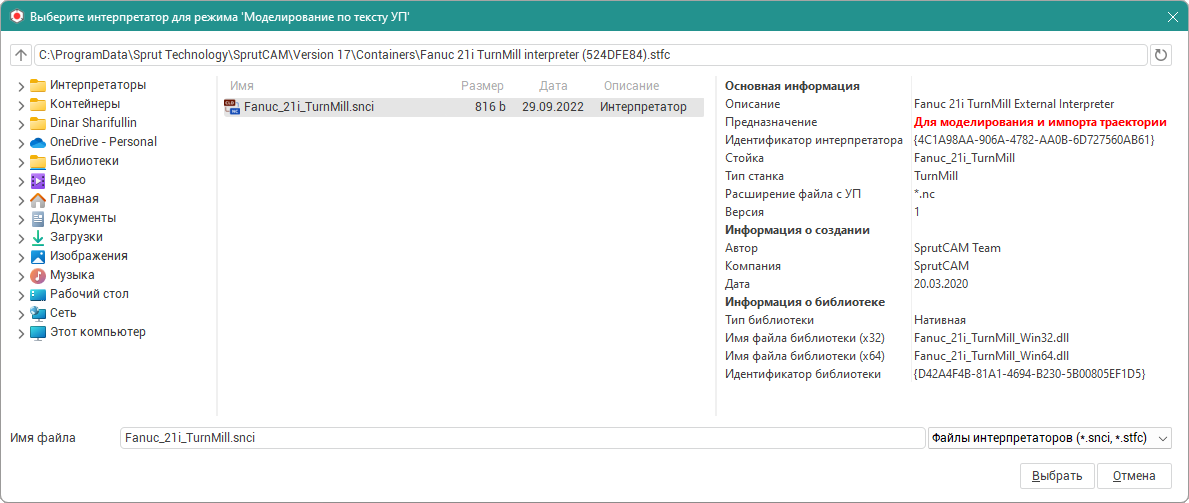
Войдите в полученный контейнер как в папку, выберите интерпретатор для моделирования внутри контейнера.
Задание постпроцессора и интерпретатора "по-умолчанию" в кинематической схеме станка
Существует возможность задания имени файла постпроцессора и имени файла интерпретатора "по умолчанию" в кинематической схеме станка. Для этого в XML-файл схемы станка нужно добавить теги SPPFile, SNCIFile со ссылками на соответствующие файлы и перезапустить SprutCAM.
Теперь, при выборе станка в SprutCAM, постпроцессор и интерпретатор будут уже заданы, а их значения получены из кинематической схемы. При необходимости, из пользовательского интерфейса SprutCAM, для текущего проекта значения постпроцессора и интерпретатора можно переопределить.
Пример:
<SCType ID="Fanuc 30i" Caption=""Fanuc 30i" type=""Fanuc30i" Enabled="true">
<... другие теги ... />
<SPPFile DefaultValue="$(PROGRAM_PERSONAL)\Postprocessors\Mill\Fanuc (30i)_Mill.sppx"/>
<SNCIFile DefaultValue="$(PROGRAM_PERSONAL)\Interpreters\Mill\Fanuc (30i)_Mill.snci"/>
<... другие теги ... />
</SCType>
В настоящее время для использования доступны интерпретаторы следующих систем ЧПУ:
|
Группа станка |
Система ЧПУ |
Комментарий |
Примечание |
|
Фрезерный |
APT |
Только для импорта траектории |
|
|
Apt_Simplify_3D |
Только для импорта траектории |
|
|
|
ISO |
Только для импорта траектории |
|
|
|
Global control |
Только для импорта траектории |
Необходима дополнительная лицензия |
|
|
Fanuc 30i |
Для моделирования и импорта траектории |
|
|
|
Haas VF-2 |
Для моделирования и импорта траектории |
|
|
|
Heidenhain iTNC 530 |
Для моделирования и импорта траектории |
|
|
|
Mazatrol SmoothG |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
|
NC210 |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
|
Sinumerik 840D |
Для моделирования и импорта траектории |
|
|
|
Tormach PCNC Mach3 |
Для моделирования и импорта траектории |
|
|
|
Tormach PCNC PathPilot |
Для моделирования и импорта траектории |
|
|
|
Токарный |
Mazatrol SmoothC |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
Токарно-фрезерный |
Fanuc 21i |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
NC220 |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
|
Sinumerik 840D |
Для моделирования и импорта траектории |
|
|
|
Okuma OSP-P300 |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
|
Робот |
Fanuc robot (контроллер R-30iB) |
Для моделирования и импорта траектории |
|
|
Kuka robot |
Для моделирования и импорта траектории |
|
|
|
Motoman robot |
Для моделирования и импорта траектории |
|
|
|
ABB robot |
Для моделирования и импорта траектории |
|
|
|
Nachi robot (AW Format) |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
Примечание: Все интерпретаторы реализуют только перечень команд, генерируемый соответствующими постпроцессорами из дистрибутива SprutCAM.
Интерпретаторы "Только для импорта траектории" не поддерживают соответствие строка УП - траектория движения инструмента.
При выборе интерпретатора обратите внимание на его предназначение (поле Предназначение на панели предварительного просмотра).
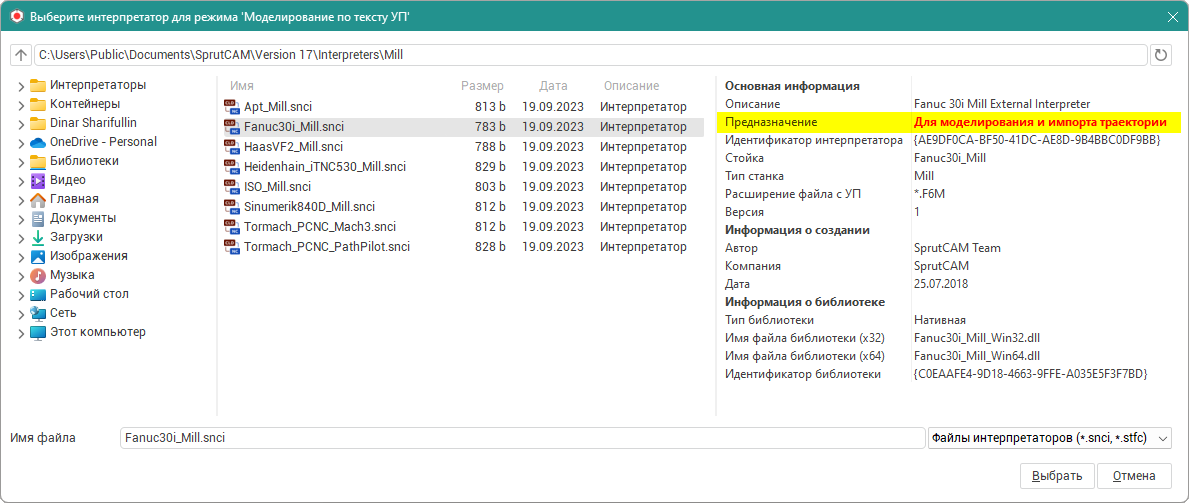
Выбранный интерпретатор должен быть предназначен для моделирования по управляющей программе. В ином случае траектория движения инструмента может быть некорректной (иметь смещение относительно системы координат заготовки, сдублированные подходы/отходы, неверную начальную позицию и прочее).
Особенности моделирования по УП.
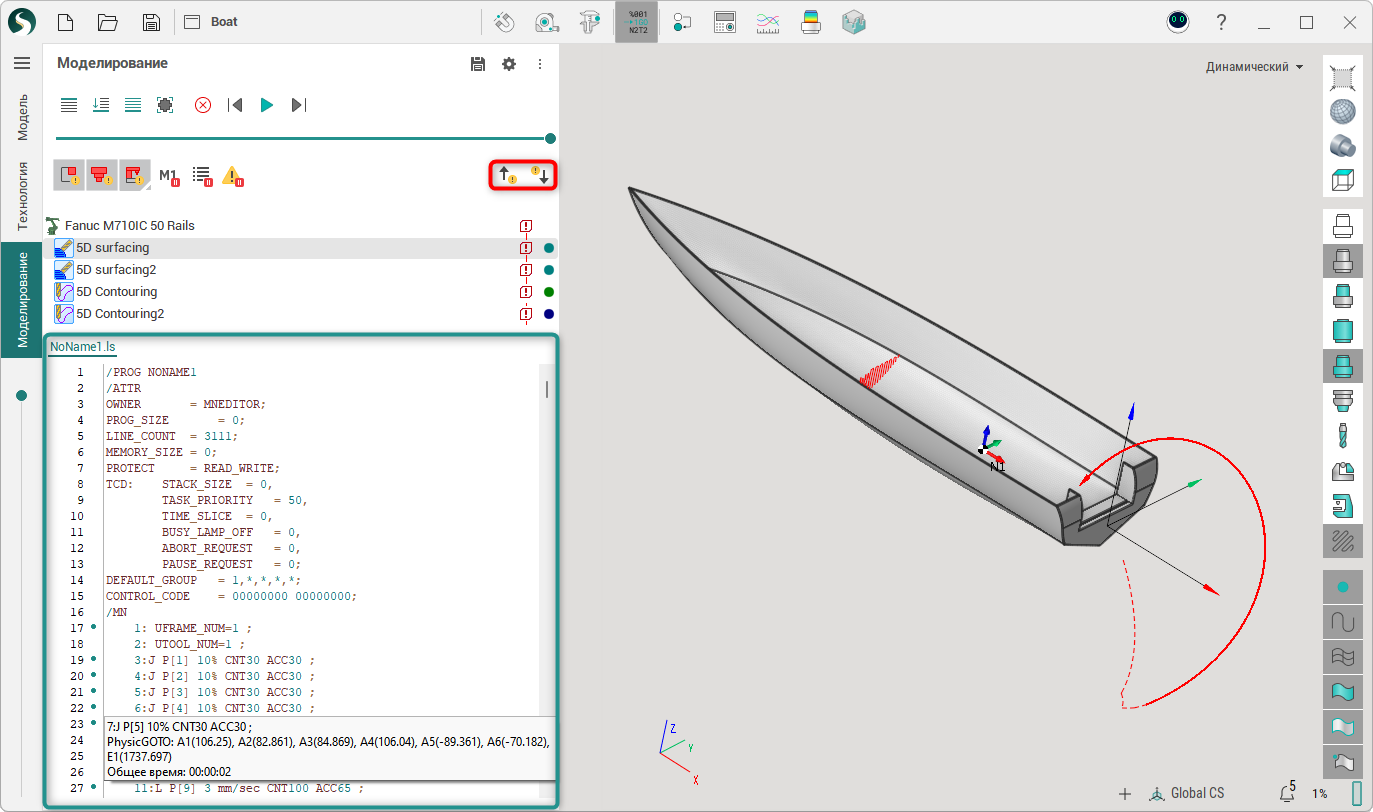
Если режим включен, то после расчёта траектории движения инструмента SprutCAM автоматически сформирует управляющую программу для станка с ЧПУ с заранее выбранным файлом настроек постпроцессора, выполнит преобразование текста управляющей программы в траекторию движения инструмента. Сформированная траектория будет учитывать особенности реализации постпроцессора. Текст управляющей программы для выбранной операции отображается в нижней части страницы режима <Моделирование>, сразу после списка операций технологического процесса.
После небольшой задержки указателя мыши над строкой с текстом управляющей программы во всплывающей подсказке появляется описание связанных с ней узлов дерева траектории (технологических команд CLData).
Примечание: Подсказку можно скрыть, для этого достаточно немного сдвинуть указатель мыши или нажать любую клавишу, например [Esc] или одну из клавиш навигации по тексту управляющей программы: [↓] или [↑].
Слева от текста управляющей программы имеется служебное поле, для отображения вспомогательной информации. Помимо номера, для каждой строки отображается статус всех связанных с ней узлов дерева траектории. Значения отображаемых иконок аналогичны тем, которые используются для технологических команд CLData. Таким образом, можно однозначно идентифицировать кадр управляющей программы, в котором существуют ошибочные узлы дерева траектории. Кнопки  и
и  позволяют перемещаться по тексту управляющей программы между ошибками.
позволяют перемещаться по тексту управляющей программы между ошибками.
Поддержка сторонних интерпретаторов.
Поддерживаются интерпретаторы сторонней разработки для моделирования по тексту управляющей программы. Файл настроек интерпретатора (*.snci) должен содержать ссылку на программную библиотеку, при помощи которой производится интерпретация текста УП. На странице Создание собственного интерпретатора приведено описание процесса создания вашего собственного интерпретатора: файла настроек и программного интерфейса приложения (API).
Видео по верификации G-кода
Сопутствующие ссылки:
Управление процессом моделирования
Создание собственного интерпретатора