Управление поворотным (глобусным) столом
|
Роботизированная ячейка с глобусным столом |
|
|
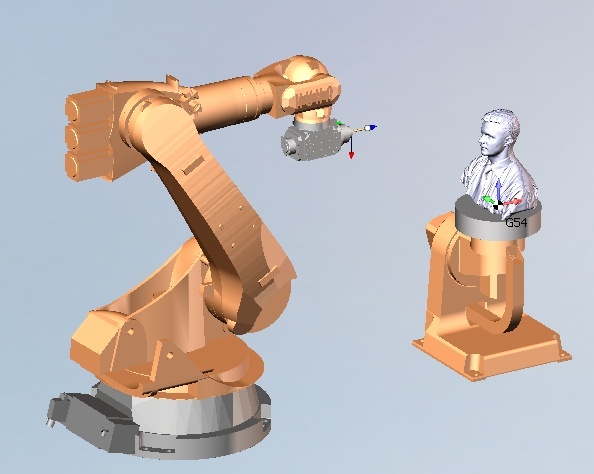
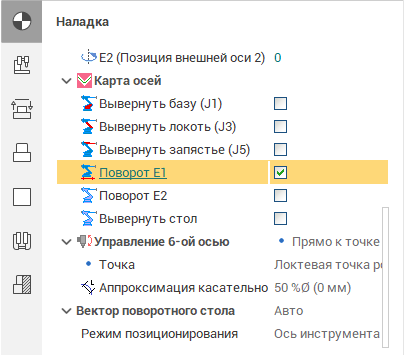
Роботизированная ячейка может оснащаться поворотным или глобусным столом, который имеет соответственно одну или две дополнительные поворотные оси. Таким образом суммарное количество управляемых осей может достигать восьми. Если в кинематической схеме активного робота имеется поворотный стол, то в каждой операции появляются дополнительные параметры для его контроля.
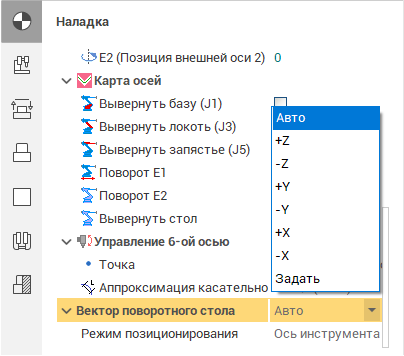
Если используется опция автоматического поворота стола, инструмент должен находиться с одной стороны от стола на протяжении всей операции. С помощью параметра <Вектор поворотного стола> можно установить с какой стороны от стола будет находиться инструмент (вектор направления оси инструмента к центру стола в глобальной системе координат робота).
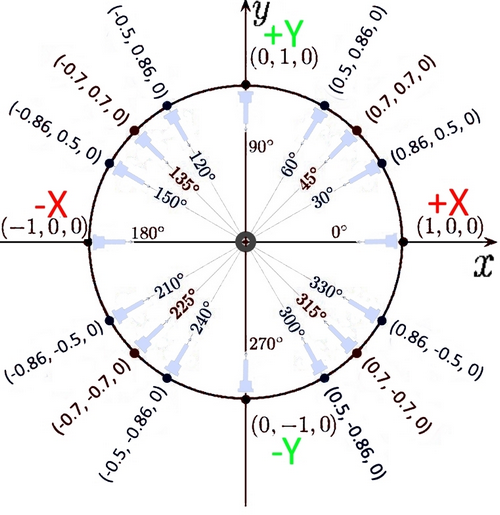
На схеме расположенной снизу указаны примеры задания векторов для разных углов.