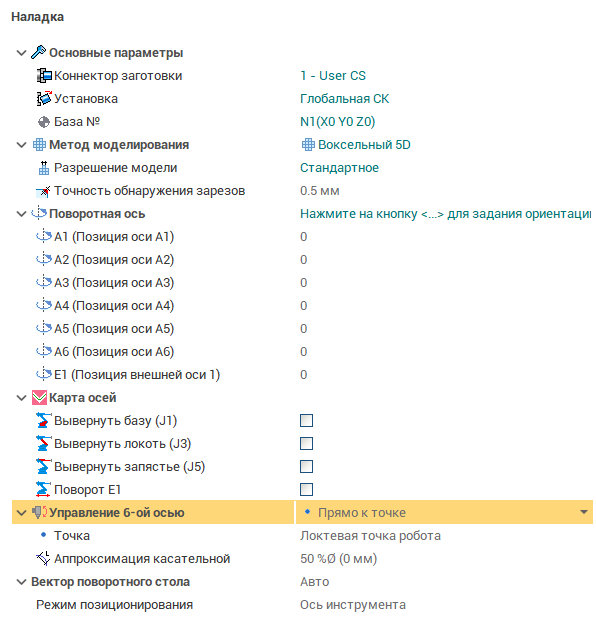
Управление 6й осью робота

Для позиционирования осевого инструмента (фреза, луч, струя) необходимо пять степеней свободы. Стандартный промышленный робот имеет 6 осей. В том случае если инструмент не соосен с осью вращения последнего сустава робота, то существует бесконечное множество вариантов позиционирования робота в определенную точку за счет поворота инструмента вокруг собственной оси. Это дает дополнительную гибкость в достижении труднодоступных зон, а также помогает обходить различного рода кинематические сингулярности и избегать механических столкновений узлов оборудования.
В системе SprutCAM предусмотрено два способа позиционирования оси 6го сустава:
автоматический,
ручной.
Вы можете управлять этим через инспектор свойств операции.
Автоматический способ
Автоматический способ представлен несколькими режимами управления 6-й осью.
Прямо к точке.
Фиксированный вектор.
Траектория.

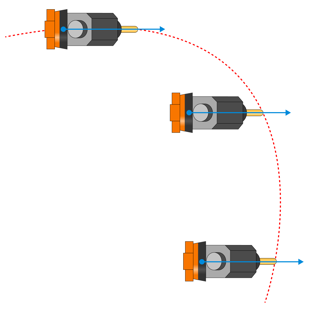
Фиксированный вектор
В этом режиме вы задаете ось (трехмерный вектор) вдоль которого будет выравниваться ось Z фланца робота (вектор фланца инструмента).
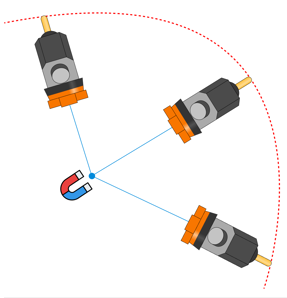
Прямо к точке
В данном режиме вы указываете 3d точку в которую должен быть направлен вектор фланца робота во время обработки.
Траектория
В этом режиме одна из осей СК инструмента выравнивается вдоль касательной к траектории в каждой точке.
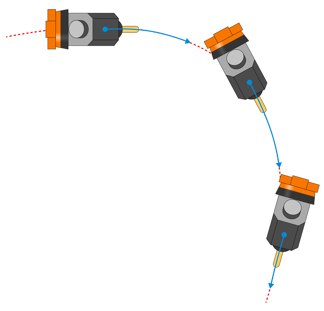
Опционально вы также можете задать Точность аппроксимации касательной и постоянное Угловое отклонение от касательной к траектории в каждой точке.
Ручной способ
Ручной способ программирования 6-й оси выполняется при помощи Карты осей робота.
Также возможно совмещение обоих способов: использование автоматического закона для большей части траектории и применение дополнительных коррекций 6-й оси в некоторых местах траектории при помощи Карты осей робота.