Обход недостижимых позиций и сингулярностей
Особенностью программирования робота является наличие у него "лишних" степеней свободы. Это обеспечивает бесконечное множество вариантов позиционирования в заданную точку. Способы автоматического выбора подходящей позиции описаны в главах:
Однако иногда этих возможностей бывает недостаточно, и возникает потребность непосредственного указания значения оси для каждой точки траектории. Для реализации этой возможности в системе имеется специальный оптимизатор, окно которого открывается следующей кнопкой.
Примечание : доступно при лицензии на опцию "Робот +".
В окне оптимизатора можно задать закон изменения отдельной оси вдоль всей траектории.
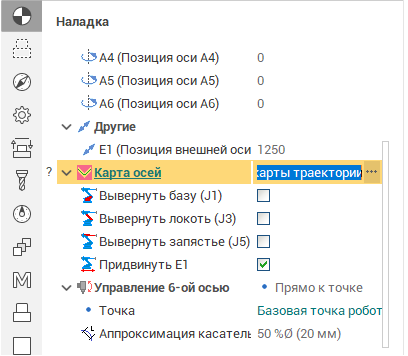
Конфигурация робота
Сначала нужно выбрать конфигурацию/состояние робота, которое будет использоваться в операции. Это та же конфигурация, которую вы можете редактировать в настройках операций в параметре «Карта осей робота». Конфигурация робота определяется «флипами» - альтернативными позициями соединений робота (база, локоть, запястье), которые определяют одинаковое положение инструмента относительно заготовки, - и режимами позиционирования дополнительных осей, таких как рельсы и поворотные столы (движение вверх E1, вращение E2).
Оптимизируемая ось
С помощью вкладок можно переключаться между различными доступными для оптимизации осями робота.
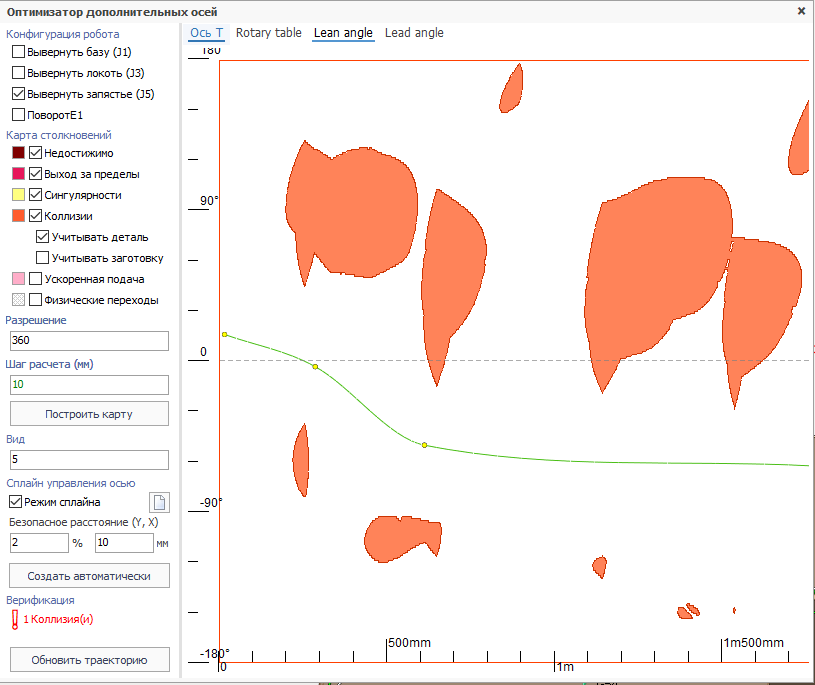
Карта столкновений
Карта столкновений - это визуальное представление зон столкновений в траектории. Вдоль оси X - положение инструмента на траектории с начала, измеренное по длине. Вдоль оси Y - значение оптимизированной оси. Обнаруживаются следующие типы столкновений .
Недостижимые зоны (бордовые) - это зоны, до которых робот не может дотянуться.
Зоны за пределами осей (фиолетовые) - это зоны, в которые робот может попасть, но некоторые из осей робота выходят за установленные пределы.
Зоны сингулярности (желтые) - это зоны, в которых суставы робота движутся с предельной скоростью.
Зоны столкновения (оранжевые) - это зоны, где детали робота сталкиваются друг с другом или с заготовкой.
Разрешение карты может быть установлено в поле Разрешение как размер шага вдоль оси Y, используемый при построении карты.
Чтобы построить или обновить карту, нажмите кнопку Построить карту.
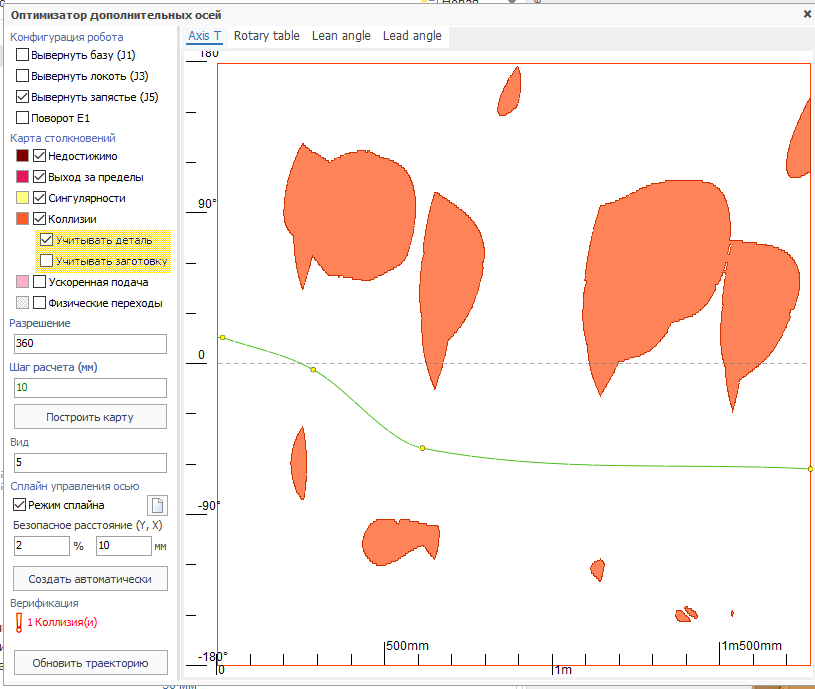
Учет детали и заготовки
Под галочкой "Коллизии" были добавлены 2 галочки для управления учетом заготовки и/или детали при обнаружении столкновений. Они доступны только если была выбрана родительская галочка. Учет заготовки/детали целесообразно переключать в зависимости от типа обработки - резание, аддитивная обработка, либо сварка.
Сплайн траектории оси
Траектория оси определяется кривой в виде сплайна. По умолчанию его нет, что означает, что либо оптимизируемая ось находится в одном и том же состоянии (в ручном режиме) или контролируется автоматически (в автоматическом режиме) на протяжении всей траектории операции (горизонтальная серая пунктирная линия).
Цель состоит в построении наилучшей кривой, проходящей слева направо через зоны, свободные от столкновений.
Для создания нового сплайна кликните 2 раза мышкой на точку в пустой зоне, через которую должен проходить сплайн. Достаточно 2 точек. После создания можно менять форму сплайна с помощью перетаскивания контрольных точек мышью. Для удаления точки нажмите правую кнопку мыши, для добавления новых точек используйте левую кнопку дважды.
Кнопка Очистить удаляет текущий сплайн.
С помощью кнопки Создать автоматически можно сгенерировать сплайн, проходящий через свободные от столкновений зоны.
Верификация
В этой области отображается статус текущей траектории. Если в траектории нет коллизий, отображается текст "Ok" зеленого цвета, если коллизии есть, их количество показывается красным. Статус обновляется каждый раз, когда вы меняете сплайн управления осью.
Одновременно в графическом представлении зоны столкновения в реальной кривой траектории также отмечены областями соответствующего цвета типа столкновения.
Для исправления либо кликните на пустую область карты, либо двигайте сплайн, удерживая левую кнопку мыши, в нужную точку траектории.
Обновить траекторию
Для применения закона управления осью нажмите кнопку Обновить траекторию.