Обработка промышленными роботами
Система SprutCAM позволяет программировать промышленные роботы для обрезки, фрезеровки, окраски и других целей. Для программирования движения исполнительного органа вдоль контура или поверхности используются те же операции, что и при обработке на фрезерных станках. Но в случае, если активным оборудованием является робот, каждая операция имеет ряд дополнительных параметров для управления его конфигурацией и "лишними" степенями свободы.
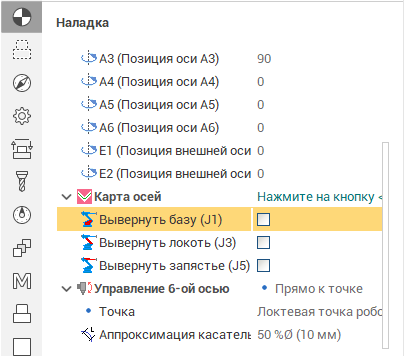
В отличие от станков, робот может иметь несколько состояний для позиционирования рабочего органа в одну и ту же позицию. Выбор конкретного состояния, которое будет использоваться в выбранной операции, осуществляется галочками <Вывернуть базу>, <Вывернуть локоть>, <Вывернуть запястье>.
В данной главе описаны следующие особенности программирования роботов:
Настройка системы координат инструмента и заготовки