Управление положением осей станка
Окно управления положением осей станка/робота Станочный пульт позволяет наблюдать и изменять текущие значения всех координат станка (робота). Включить видимость данного окна можно при помощи кнопки ![]() на главной панели инструментов. Его использование удобно при анализе траектории перемещений инструмента в режиме моделирования, при построении ручных подходов-отходов, при определении начального положения станка для расчета технологической операции.
на главной панели инструментов. Его использование удобно при анализе траектории перемещений инструмента в режиме моделирования, при построении ручных подходов-отходов, при определении начального положения станка для расчета технологической операции.
Визуально окно разделено на несколько областей. Количество панелей и их содержимое может изменяться в зависимости от настроек конкретной схемы станка.
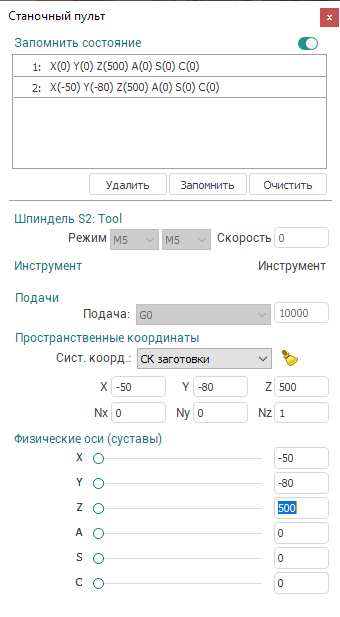
В самой верхней области расположены панели, отображающие режимы работы и скорости вращения шпинделей станка. Количество записей соответствует количеству шпинделей, определенных в схеме станка. Текстовые поля здесь могут принимать следующие значения.
RPM/CSS - режим вращения - с постоянной угловой (обороты в минуту) или постоянной линейной скоростью (м/мин или фут/мин).
M3/M4/M5 - направление вращения шпинделя - по или против часовой стрелки. M5 - шпиндель неподвижен.
Скорость вращения шпинделя.
Ниже расположены панели <Пространственные координаты>, отображающие текущие пространственные координаты настроечной точки инструмента в системе координат заготовки, базовой СК станка, СК текущего инструмента либо СК выбранного объекта (в последних двух случаях СК будет показана на экране). Количество панелей определяется количеством каналов станка.
Первое поле может содержать значения G0, MPM и MPR определяющие тип и единицы измерения подачи инструмента. G0 - инструмент движется на ускоренной подаче, MPM - инструмент движется с обычной подачей, заданной в мм/мин или дюйм/мин, MPR - подача задана в единицах на оборот (мм/об или дюйм/об).
Второе поле содержит величину подачи.
Поля X, Y и Z содержат координаты кончика инструмента в текущей пространственной системе координат заготовки.
Поля RX, RY, RZ, RW - содержат величины, определяющие ориентацию инструмента в текущей пространственной системе координат заготовки. В зависимости от настроек схемы станка величины могут быть представлены либо как компоненты вектора нормали инструмента, либо как углы Эйлера различных типов, либо как компоненты кватерниона.
Панель <Физические оси (суставы)> содержит полный список линейных, поворотных и вспомогательных осей станка, которые определены в схеме. Минимальный и максимальный пределы перемещения (соответствуют положению концевых выключателей) и нулевое положение для каждой физической оси определяются производителем оборудования и не зависят от текущей системы координат заготовки.
В самом низу окна находится панель <Запомнить состояние>, на которой отображается список запомненных состояний станка и несколько кнопок управления элементами этого списка. Кнопка <Запомнить> создает копию текущих значений всех параметров состояния (осей) станка и добавляет это состояние в список. Кнопка <Удалить> позволяет исключить из списка одно выделенное состояние. Кнопка <Очистить> удаляет все состояния станка из списка запомненных. Для перевода станка в одно из запомненных состояний достаточно сделать двойной щелчок по нужному состоянию в списке. Использование функции запоминания состояний удобно при ручном построении сложных переходов между операциями на станках со сложной конфигурацией осей (например на 6-осевых роботах).
Сопутствующие ссылки: