Machine's approach/return list
Approach/return list overview
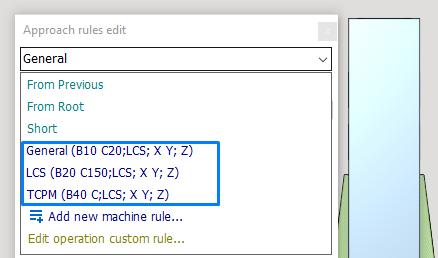
In the "Leads" section of machine's xml file several rules for approach/return can be specified for convenient use. Each item of the list has a name to distinguish it from other rules. If the rule in the list was edited, it will affect all the operations which reference this rule. To assign a rule to operation, select the necessary item in the Approach/return edit form:
Approach/return list alternative
There is an alternative way to have several rules for approach or return - create submachines for the workpiece holder/tool holder pairs used in the project and define appropriate approach and return rule for each submachine. See Submachine definition in the machine schemas for more info about submachines in SprutCAM X.
Editing approach/return list
There are 2 ways of editing the machine's approach/return list.
Direct editing of machine's xml file (shown in this article)
Using the approach/return edit form. To display the form click the ellipsis button in the approach/return edit field.
Editing machine's xml file
The machine's approach/return list is located in the <Leads> section (previously here could be specified just one approach/return rule). <ApproachCommands> and <ReturnCommands> are the names of the respective subsections. Each rule has 3 fields:
<RuleID> - unique GUID of the rule. It's used as a method for operations to reference a particular rule. See the operation's GUID as an example.
<Name> - name of the rule.
<Command> - the rule itself, the sequence of intermediate points of approach/return. To specify the approach/return with collision avoidance use keyword 'Auto'.
<Type> - type of the rule which defines possible use case for the approach/return. Currently there are 4 available types:
LCS - approach/return can be used only if the local coordinate system is enabled for the operation.
TCPM - can be used only if the tool center point management (TCPM) is enabled (both LCS and TCPM cant be enabled at the same time).
General - the rule can be used only if both LCS and TCPM are off.
Undefined - the rule doesn't depend on LCS or TCPM state. If the type wasn't explicitly defined it is assumed to be 'Undefined'.
Below is the partial example of xml file:
<SCType ID="MaxTurn65WithCounterSpindle" Caption="MaxTurn65 with Counter Spindle" type="MaxTurn65" Enabled="true"> <GUID DefaultValue="{8E0CEF0A-8045-436D-89FD-BBE70D387AB1}"/> <Priority DefaultValue="172"/> <Name DefaultValue="MaxTurn 65 with Counter Spindle"/> <Comment DefaultValue="MaxTurn 65 with Counter Spindle"/> <Leads> <ApproachCommands> <SCArray> <Rule> <RuleID>{41D3BB1C-2F23-47AC-B5F9-5DAF7030A015}</RuleID> <Command>C;Z10;X;Z</Command> <Name>Left spindle approach</Name> </Rule> <Rule> <RuleID>{54FC19E5-8ACB-491A-8E94-FC9990FC8680}</RuleID> <Command>C2;Z-10;X;Z</Command> <Name>Right spindle approach</Name> </Rule> </SCArray> </ApproachCommands> <ReturnCommands> <SCArray> <Rule> <RuleID>{380D355A-6708-4C86-BA69-7521A0198A8E}</RuleID> <Command>Z10;X;Z;C</Command> <Name>Left spindle return</Name> </Rule> <Rule> <RuleID>{18B61D64-EEC9-4403-8922-CCFCC017E53E}</RuleID> <Command>Z-10;X;Z;C2</Command> <Name>Right spindle return</Name> </Rule> </SCArray> </ReturnCommands></Leads>Conversion of the older version machines/projects
When the older version machine is opened for the first time, the list consisting the machine's previous approach/return rule is created. Also the root operation references this rule (if no custom rule is assigned to it). As a result, operations having 'From root operation' rule type use the same approach/return as before.
See also:
Approach and return rules overview
Submachine definition in the machine schemas