Перечень интерпретаторов
В настоящее время для использования доступны интерпретаторы следующих систем ЧПУ:
|
Группа станка |
Система ЧПУ |
Комментарий |
Примечание |
|
Фрезерный |
APT |
Только для импорта траектории |
|
|
Apt_Simplify_3D |
Только для импорта траектории |
|
|
|
ISO |
Только для импорта траектории |
|
|
|
Global control |
Только для импорта траектории |
Необходима дополнительная лицензия |
|
|
Fanuc 30i |
Для моделирования и импорта траектории |
|
|
|
Haas VF-2 |
Для моделирования и импорта траектории |
|
|
|
Heidenhain iTNC 530 |
Для моделирования и импорта траектории |
|
|
|
Mazatrol SmoothG |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
|
NC210 |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
|
Sinumerik 840D |
Для моделирования и импорта траектории |
|
|
|
Tormach PCNC Mach3 |
Для моделирования и импорта траектории |
|
|
|
Tormach PCNC PathPilot |
Для моделирования и импорта траектории |
|
|
|
Токарный |
Mazatrol SmoothC |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
Токарно-фрезерный |
Fanuc 21i |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
NC220 |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
|
Sinumerik 840D |
Для моделирования и импорта траектории |
|
|
|
Okuma OSP-P300 |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
|
|
Робот |
Fanuc robot (контроллер R-30iB) |
Для моделирования и импорта траектории |
|
|
Kuka robot |
Для моделирования и импорта траектории |
|
|
|
Motoman robot |
Для моделирования и импорта траектории |
|
|
|
ABB robot |
Для моделирования и импорта траектории |
|
|
|
Nachi robot (AW Format) |
Для моделирования и импорта траектории |
Необходима дополнительная лицензия |
Примечание: Все интерпретаторы реализуют только перечень команд, генерируемый соответствующими постпроцессорами из дистрибутива SprutCAM.
Интерпретаторы "Только для импорта траектории" не поддерживают соответствие строка УП - траектория движения инструмента.
При выборе интерпретатора обратите внимание на его предназначение (поле Предназначение на панели предварительного просмотра).
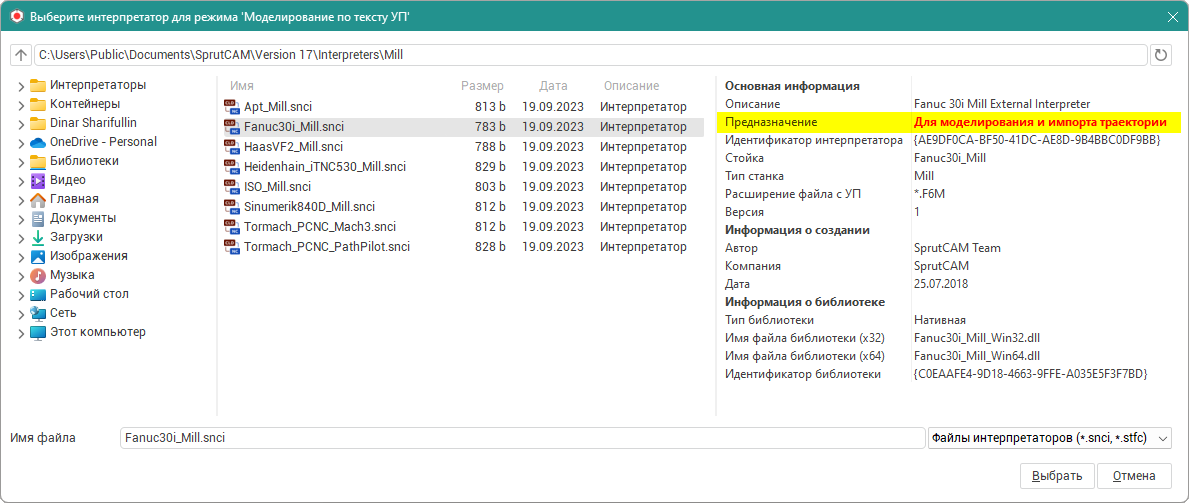
Выбранный интерпретатор должен быть предназначен для моделирования по управляющей программе. В ином случае траектория движения инструмента может быть некорректной (иметь смещение относительно системы координат заготовки, сдублированные подходы/отходы, неверную начальную позицию и прочее).