Многокоординатное перемещение по окружности <MULTIARC>
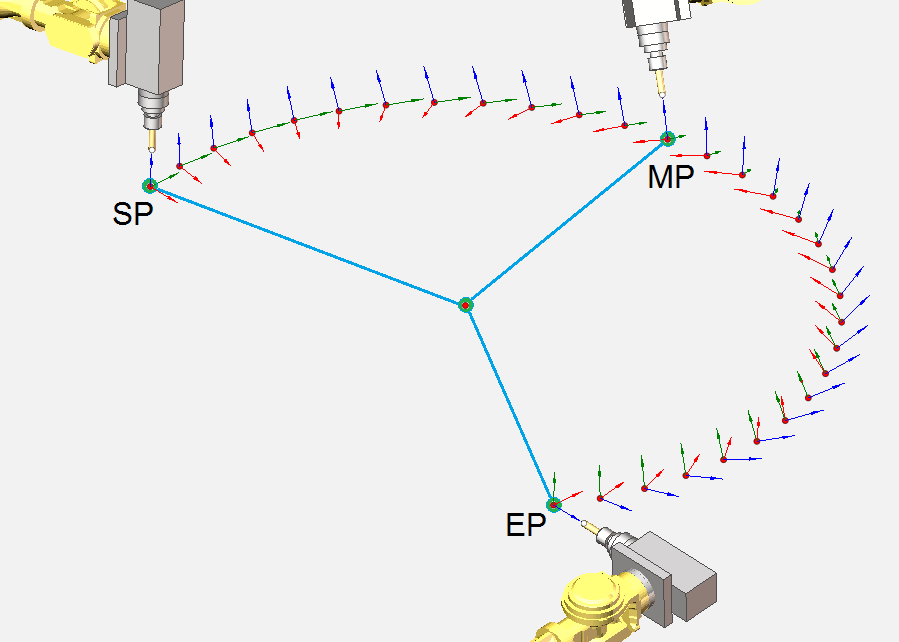
Команда <MULTIARC> задает перемещение по дуге окружности, проходящей через три точки, с заданной ориентацией инструмента в пространстве для каждой из этих точек. На рисунке ниже SP - начальная позиция, в которой находится инструмент перед выполнением команды, MP - промежуточное положение инструмента на дуге, EP - конечное положение инструмента.
Команда:
MULTIARC EPX ep.X, EPY ep.Y, EPZ ep.Z, EPRX ep.Rx, EPRY ep.Ry, EPRZ ep.Rz, EPRW ep.Rw, MPX mp.X, MPY mp.Y, MPZ mp.Z, MPRX mp.Rx, MPRY mp.Ry, MPRZ mp.Rz, MPRW mp.Rw)
Параметры:
|
Параметр |
Описание |
||
|
ep.X |
CLD[1] |
CLD.EPX |
Декартовы координаты X, Y и Z конечной точки дуги |
|
ep.Y |
CLD[2] |
CLD.EPY |
|
|
ep.Z |
CLD[3] |
CLD.EPZ |
|
|
ep.Rx |
CLD[4] |
CLD.EPRX |
Параметры, определяющие ориентацию инструмента в конечной точке дуги относительно текущей системы координат (поля RX, RY, RZ и RW). В зависимости от настроек системы (определяются в схеме станка) ориентация инструмента может задаваться:
|
|
ep.Ry |
CLD[5] |
CLD.EPRY |
|
|
ep.Rz |
CLD[6] |
CLD.EPRZ |
|
|
ep.Rw |
CLD[7] |
CLD.EPRW |
|
|
mp.X |
CLD[8] |
CLD.MPX |
Декартовы координаты X, Y и Z промежуточной точки дуги |
|
mp.Y |
CLD[9] |
CLD.MPY |
|
|
mp.Z |
CLD[10] |
CLD.MPZ |
|
|
mp.Rx |
CLD[11] |
CLD.MPRX |
Параметры, определяющие ориентацию инструмента в промежуточной точке дуги относительно текущей системы координат (поля RX, RY, RZ и RW). В зависимости от настроек системы (определяются в схеме станка) ориентация инструмента может задаваться:
|
|
mp.Ry |
CLD[12] |
CLD.MPRY |
|
|
mp.Rz |
CLD[13] |
CLD.MPRZ |
|
|
mp.Rw |
CLD[14] |
CLD.MPRW |
|
Параметры, доступные через оператор Cmd
|
TCLDMultiArc: ComplexType |
Команда перемещения по окружности, задаваемой тремя точками в пространстве. |
||||
|
EndPos: ComplexType |
Cmd.Ptr["EndPos"] - структура, поля которой задают расположение инструмента в конечной точке окружности. |
||||
|
Axes: Array, Key="AxisID" |
Cmd.Ptr["Axes"] - Массив структур типа Axis. Одна команда может содержать перемещения сразу по нескольким осям станка, положение каждой из которых хранится в данном массиве. |
||||
|
Axis: ComplexType |
Cmd.Ptr["Axes"].Item[Index] или Cmd.Ptr["Axes(<AxisName>)"] - Отдельный элемент массива Axes. Содержит информацию о перемещении по одной оси станка. Доступ к элементам массива возможен либо по индексу, либо по ключевому полю. Здесь <AxisName> - значение ключевого поля, которое должно совпадать со значением поля AxisID. |
||||
|
AxisID: String |
Cmd.Str["Axes(<AxisName>).AxisID"] - Идентификатор управляемой координаты (оси) станка, для которой задается новое положение. Определяется схемой станка. |
||||
|
Value: Double |
Cmd.Flt["Axes(<AxisName>).Value"] - Новое положение оси станка, в которое она перемещается. |
||||
|
Pos5D: ComplexType |
Cmd.Ptr["Pos5D"] - структура содержащая координаты, определяющие конечное положение инструмента в пространстве. Определяет не только положение настроечной точки инструмента (поля X, Y и Z - декартовы координаты), но и ориентацию инструмента относительно текущей системы координат (поля NX, NY, NZ и NW). В зависимости от настроек системы (определяются в схеме станка) ориентация инструмента может задаваться:
|
||||
|
X: Double |
Cmd.Flt["Pos5D.X"] - декартова координата X положения кончика инструмента. |
||||
|
Y: Double |
Cmd.Flt["Pos5D.Y"] - декартова координата Y положения кончика инструмента. |
||||
|
Z: Double |
Cmd.Flt["Pos5D.Z"] - декартова координата Z положения кончика инструмента. |
||||
|
NX: Double |
Cmd.Flt["Pos5D.NX"] - в зависимости от настроек системы может содержать компонент NX вектора нормали инструмента, угол поворота вокруг одной из координатных осей, либо коэффициент кватерниона. |
||||
|
NY: Double |
Cmd.Flt["Pos5D.NY"] - в зависимости от настроек системы может содержать компонент NY вектора нормали инструмента, угол поворота вокруг одной из координатных осей, либо коэффициент кватерниона. |
||||
|
NZ: Double |
Cmd.Flt["Pos5D.NZ"] - в зависимости от настроек системы может содержать компонент NZ вектора нормали инструмента, угол поворота вокруг одной из координатных осей, либо коэффициент кватерниона. |
||||
|
NW: Double |
Cmd.Flt["Pos5D.NW"] - при заданном способе вывода ориентации инструмента в виде кватерниона, представляет собой четвертый коэффициент кватерниона. |
||||
|
MachineStateFlags: Integer |
Cmd.Ptr["MachineStateFlags"].Bit[i], i=(0..31). Цело число, которое представляет собой битовое поле из 32 бит от 0 до 31. При наличии нескольких вариантов расположения осей станка, обеспечивающих заданное положение инструмента в пространстве, каждый бит этого поля определяет выбор одного из возможных решений. Например, пятикоординатный станок с осями A и C для большинства положений инструмента имеет два возможных решения - с положительным значением оси A и с отрицательным значением оси A. Нулевой бит этого поля будет определять какое из этих решений выбрать. Для стандартного шести осевого робота многие положения инструмента в пространстве могут быть обеспечены различным сочетанием положений трех его ключевых сочленений - базы, локтя и кисти, что дает в общей сложности 8 возможных решений. В этом случае нулевой бит данного поля будет определять положение базы, первый бит - положение локтя, а третий бит будет задавать положение кисти робота. Таким образом, смысл каждого из битов данного поля целиком определяется используемой схемой станка. При использовании станков, в которых необходимости использования данных флагов нет, в схеме станка имеется возможность отключить вывод данного параметра в CLData. |
||||
|
MidPos: ComplexType |
Cmd.Ptr["MidPos"] - структура, поля которой задают расположение инструмента в некоторой промежуточной точке окружности. |
||||
|
Axes: Array, Key="AxisID" |
Cmd.Ptr["Axes"] - Массив структур типа Axis. Одна команда может содержать перемещения сразу по нескольким осям станка, положение каждой из которых хранится в данном массиве. |
||||
|
Axis: ComplexType |
Cmd.Ptr["Axes"].Item[Index] или Cmd.Ptr["Axes(<AxisName>)"] - Отдельный элемент массива Axes. Содержит информацию о перемещении по одной оси станка. Доступ к элементам массива возможен либо по индексу, либо по ключевому полю. Здесь <AxisName> - значение ключевого поля, которое должно совпадать со значением поля AxisID. |
||||
|
AxisID: String |
Cmd.Str["Axes(<AxisName>).AxisID"] - Идентификатор управляемой координаты (оси) станка, для которой задается новое положение. Определяется схемой станка. |
||||
|
Value: Double |
Cmd.Flt["Axes(<AxisName>).Value"] - Новое положение оси станка, в которое она перемещается. |
||||
|
Pos5D: ComplexType |
Cmd.Ptr["Pos5D"] - структура содержащая координаты, определяющие положение инструмента в пространстве в момент прохождения некоторой промежуточной точки дуги. Определяет не только положение настроечной точки инструмента (поля X, Y и Z - декартовы координаты), но и ориентацию инструмента относительно текущей системы координат (поля NX, NY, NZ и NW). В зависимости от настроек системы (определяются в схеме станка) ориентация инструмента может задаваться:
|
||||
|
X: Double |
Cmd.Flt["Pos5D.X"] - декартова координата X положения кончика инструмента. |
||||
|
Y: Double |
Cmd.Flt["Pos5D.Y"] - декартова координата Y положения кончика инструмента. |
||||
|
Z: Double |
Cmd.Flt["Pos5D.Z"] - декартова координата Z положения кончика инструмента. |
||||
|
NX: Double |
Cmd.Flt["Pos5D.NX"] - в зависимости от настроек системы может содержать компонент NX вектора нормали инструмента, угол поворота вокруг одной из координатных осей, либо коэффициент кватерниона. |
||||
|
NY: Double |
Cmd.Flt["Pos5D.NY"] - в зависимости от настроек системы может содержать компонент NY вектора нормали инструмента, угол поворота вокруг одной из координатных осей, либо коэффициент кватерниона. |
||||
|
NZ: Double |
Cmd.Flt["Pos5D.NZ"] - в зависимости от настроек системы может содержать компонент NZ вектора нормали инструмента, угол поворота вокруг одной из координатных осей, либо коэффициент кватерниона. |
||||
|
NW: Double |
Cmd.Flt["Pos5D.NW"] - при заданном способе вывода ориентации инструмента в виде кватерниона, представляет собой четвертый коэффициент кватерниона. |
||||
|
MachineStateFlags: Integer |
Cmd.Ptr["MachineStateFlags"].Bit[i], i=(0..31). Цело число, которое представляет собой битовое поле из 32 бит от 0 до 31. При наличии нескольких вариантов расположения осей станка, обеспечивающих заданное положение инструмента в пространстве, каждый бит этого поля определяет выбор одного из возможных решений. Например, пятикоординатный станок с осями A и C для большинства положений инструмента имеет два возможных решения - с положительным значением оси A и с отрицательным значением оси A. Нулевой бит этого поля будет определять какое из этих решений выбрать. Для стандартного шести осевого робота многие положения инструмента в пространстве могут быть обеспечены различным сочетанием положений трех его ключевых сочленений - базы, локтя и кисти, что дает в общей сложности 8 возможных решений. В этом случае нулевой бит данного поля будет определять положение базы, первый бит - положение локтя, а третий бит будет задавать положение кисти робота. Таким образом, смысл каждого из битов данного поля целиком определяется используемой схемой станка. При использовании станков, в которых необходимости использования данных флагов нет, в схеме станка имеется возможность отключить вывод данного параметра в CLData. |
||||
|
Time: Double |
Время выполнения перемещения в минутах. |
||||
Список управляемых координат передаваемых в CLData определяется кинематической схемой станка SprutCAM.
Сопутствующие ссылки: