Захват и перемещение
Траектория и параметры
Операция "захват и перемещение" разработана для управления специальным инструментом типа "захват" с целью перемещения заготовки внитри рабочей зоны оборудования.
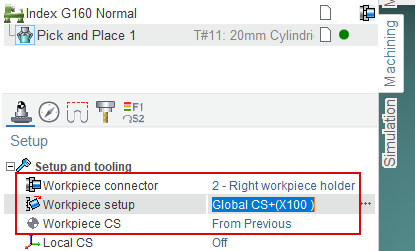
Заготовка перемещается из места, которое было задано в предыдущей операции, в новое место, которое определяется параметрами "коннектор заготовки" и "установ". Все перемещения захвата генерируются в системе координат СК заготовки.
Траектория операции "захват и перемещение" состоит из трех секций: взятие, перенос, возврат.

Секция взятие содержит перемещения захвата из исходной точки (обычно точка смены инструмента) в место захвата на детали. Место захвата определяется в геометрической системе координат на заготовке с возможностью ввода дополнительных смещений.
Секция переноса сродержит перемещения захвата вместе с деталью из исходного в требуемое положение. Перенос может выполняться как через безопасную плоскость, так и с обходом слолкновений.
Секция возврата сродержит перемещения пустого захвата в конечную точку (обычно точка смены инструмента).
Параметр "Действия" задает какие секции должны быть сгенерированы. Если опция "удалить деталь" включена, то заготовка исчезает после выполнения секции переноса.
Требования к схеме станка
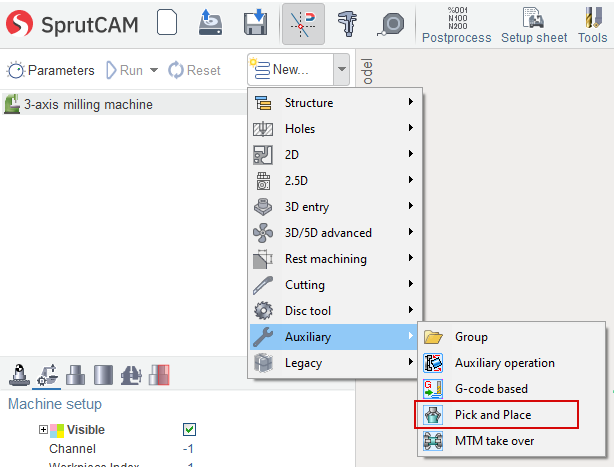
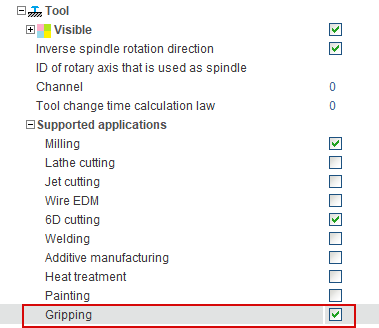
Тип оборудования может быть любым: фрезерный центр, токарный станок с противошпинделем, промышленный робот. Главное требование это наличие держателя инструмента, помеченного как "Захват". Если захват отсутствует в текущей схеме станка, то операция "захват и перенос" будет недоступна. Включить опцию захват в интерфейсе системы можно на страничке Оборудование.
Фрагмент файла схемы станка содержаший описание шпинделя, показан ниже. Обратите внимание на "Gripper" внутри секции SupportedToolTypes.
<SCType ID="MillSpindle" Caption="Mill Spindle" Type="TToolHolderNode">
<VisualProperties>
<Metallic DefaultValue="True"/>
</VisualProperties>
<XAxisID DefaultValue="AxisX"/>
<YAxisID DefaultValue="AxisY"/>
<ZAxisID DefaultValue="AxisZ"/>
<SupportedToolTypes>
<MillTool DefaultValue="true"/>
<LatheCutter DefaultValue="true"/>
<Gripper DefaultValue="true"/>
</SupportedToolTypes>
</SCType>
Адаптация схем станков с противошпинделем
Операция "захват и перемещение" может быть использована для передачи заготовки из одного шпинделя в другой на токарно-фрезерных станках. Чтобы получить такую возможность необходимо объявить противошпиндель как держатель инструмента с включенной опцией "Gripper". Если у вас имеется схема станка разработанная для SprutCAM версии 14 и более ранних, то она должна быть модифицирована. Ниже представлены отличия в файлах станка для ранних (слева) и современной версии SprutCAM.
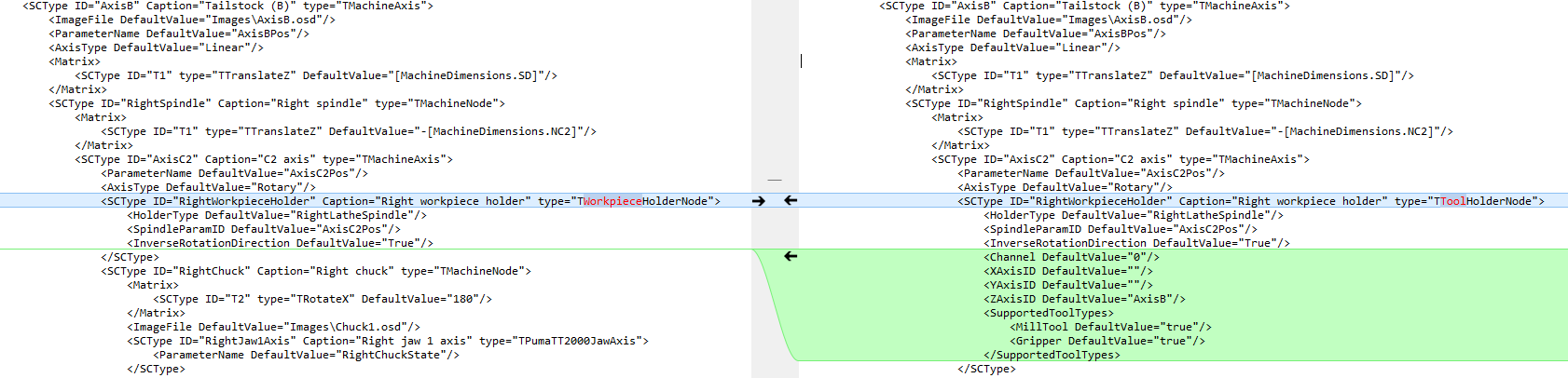
1. В объявлении противошпинделя TWorkpieceHolderNode заменено на TToolHolderNode.
2. XAxisID, YAxisID, ZAxisID - имена осей ответственных за перемещение противошпинделя вдоль соответствующих осей.
3. Gripper добавлен в SupportedToolTypes
Следующий видеоролик демострирует способ создания сборочных проектов